Image Analysis - Jupiter
Overview
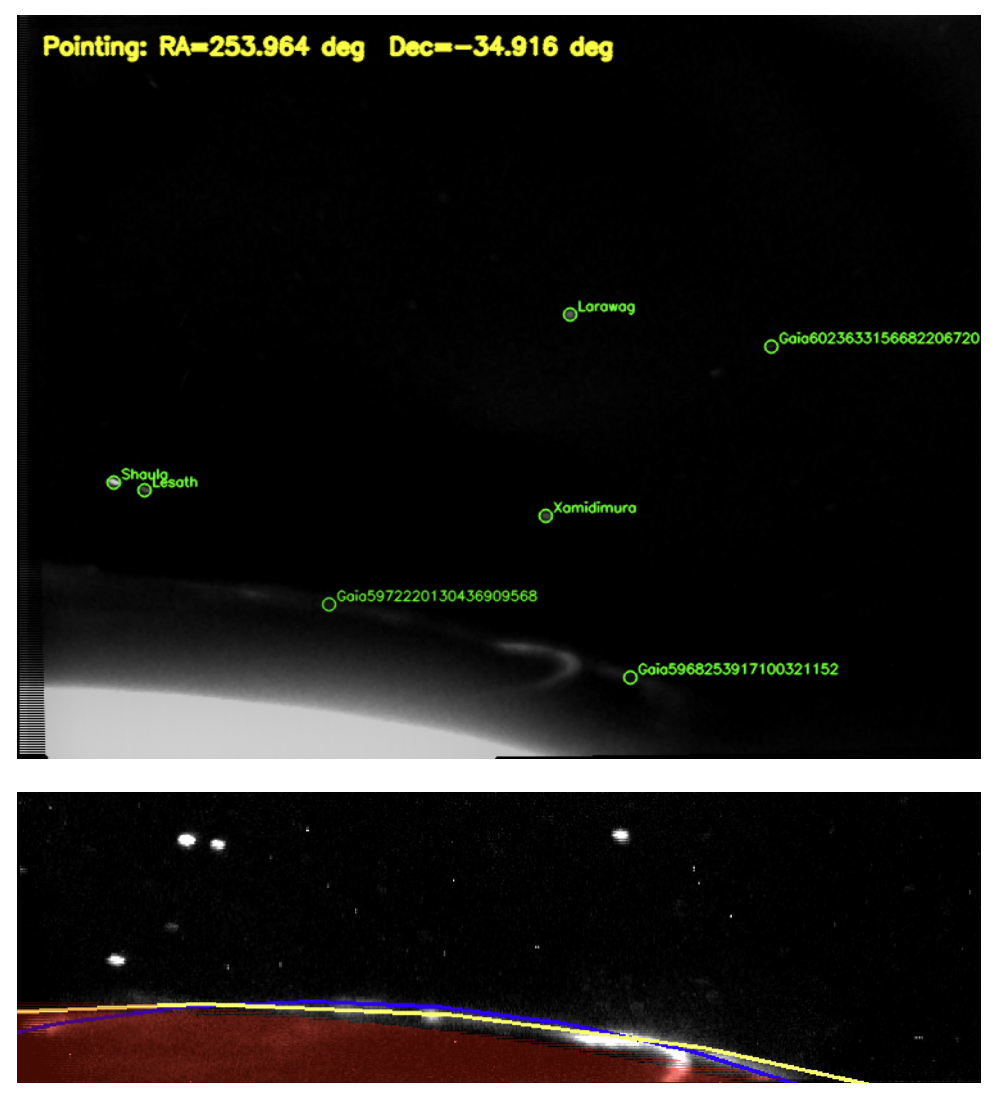
Processed Juno Advanced Stellar Compass images to calibrate/denoise frames, detect Jupiter’s limb, map stars to a catalogue, and estimate camera attitude with validation against SPICE geometry.
Built an end-to-end pipeline for 6 Juno ASC frames captured during a perijove pass: radiometric calibration (dark-frame subtraction + column-median bias removal), radiation-speckle mitigation via a gradient-switched median filter, despinning to merge odd/even interleaved fields into a consistent frame, and lens distortion correction (Brown–Conrady 1st-order radial model). On top of the corrected imagery, implemented a custom limb edge-tracking method and robust circle fitting (Hyper fit) to estimate the horizon arc, then performed star detection (dual-mask strategy), centroid extraction, pattern-based catalogue matching, and robust attitude estimation (TRIAD + RANSAC inliers + Wahba/Q-method refinement). Quantitatively compared horizon fits against SPICE-derived limb predictions and discussed the physical offset between the observed optical limb and the 1-bar reference surface.
What I learned
- • Radiometric calibration for CCD imagery: dark-frame subtraction and removal of fixed-pattern/column-correlated artifacts
- • Radiation/cosmic-ray style artifact suppression with conditional (gradient-based) filtering that preserves PSF-like stars and limb edges
- • Despinning interleaved odd/even fields by modeling spacecraft rotation in the camera frame and remapping via bilinear interpolation
- • Lens distortion correction using inverse mapping with a first-order radial Brown–Conrady model and pixel aspect ratio handling
- • Horizon extraction tailored to low-SNR limb arcs (continuity-constrained edge tracking) and robust circle fitting on short arcs (Hyper fit vs. Kåsa bias)
- • Star detection + centroiding, then catalogue-based pattern recognition and attitude estimation using TRIAD, RANSAC consensus, and Wahba (Davenport Q-method)
- • Validation mindset: comparing image-derived geometry to SPICE kernel predictions and interpreting systematic discrepancies as physical (atmospheric scattering vs. 1-bar limb)
- • Performance/feasibility analysis: LUT-based remapping, memory vs. latency trade-offs, and why full-frame processing is impractical onboard a µASC-class processor